|
I am a PhD student in the Georgia Tech School of Interactive Computing studying machine learning and robotics. I am advised by Professor Animesh Garg. Previously I did my BA and MS at BAIR with Professor Ken Goldberg. I've also spent time with Nuro and AWS. Beyond research, I enjoy outdoor activities of any sort, climbing, playing guitar/bass, and endurance sports (I was on Berkeley's triathlon team). Feel free to follow me on Strava! Email / Resume / Google Scholar / Twitter / Github / LinkedIn |

|
|
I'm interested in methods for deploying learned robot policies in new settings. This may mean quickly adapting to a new embodiment, generalizing to an unseen scene, or reasoning through an unknown task. Specifically, I'm looking into imitation learning from 3D scene representations, large multimodal models (VLAs), VLA reasoning, and scaling with simulated data. |
|
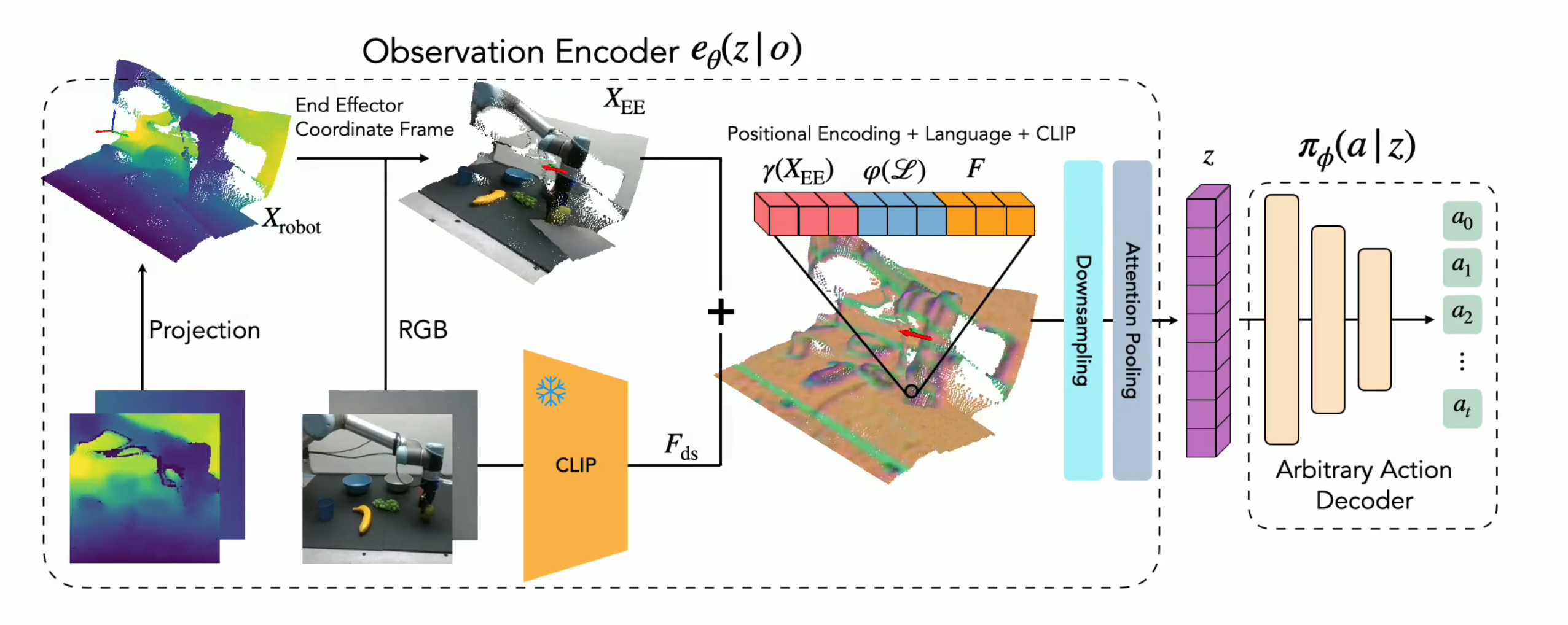
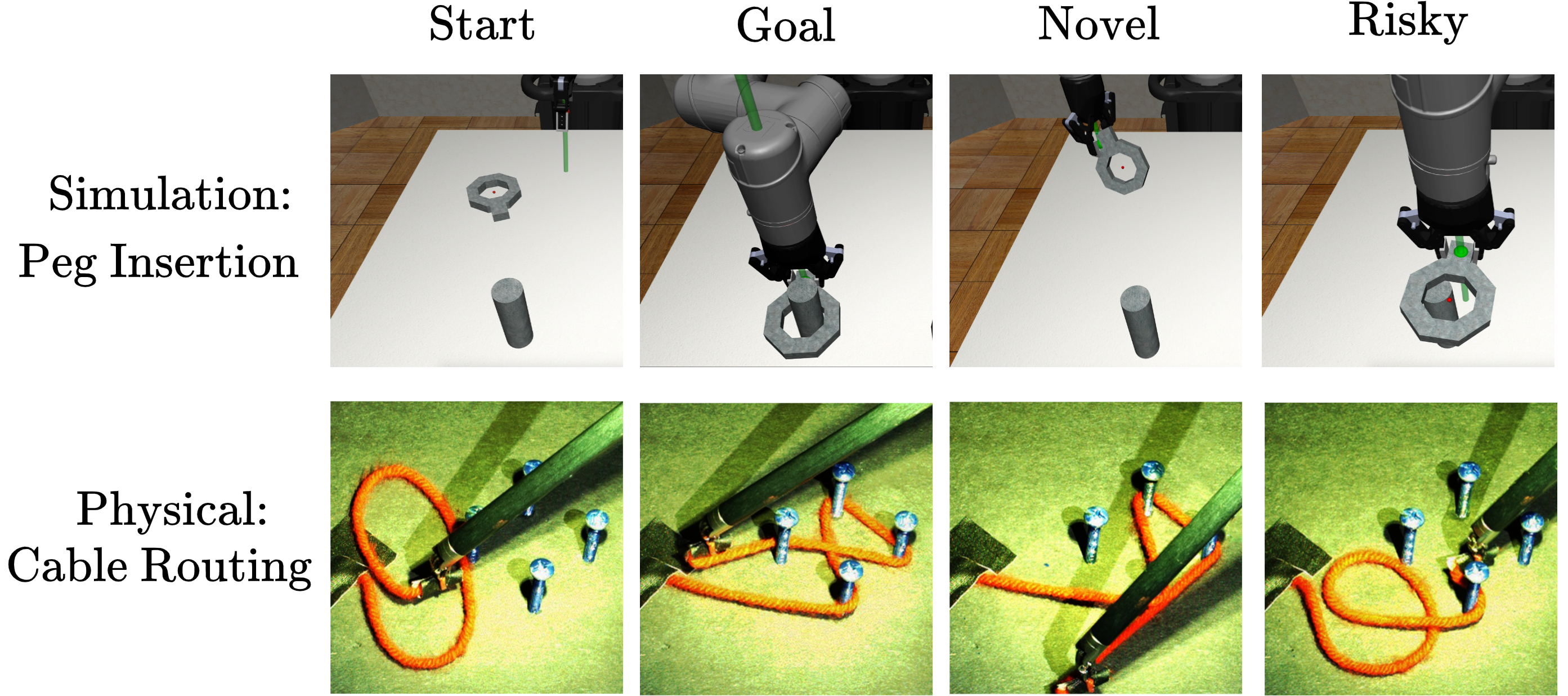
Albert Wilcox, Mohamed Ghanem, Masoud Moghani, Pierre Barroso, Benjamin Joffe, Animesh Garg. Conference on Robot Learning (CoRL), 2025. PDF / Website An imitation learning algorithm utilizing 3D scene representations to enable zero-shot transfer to novel embodiments and camera poses. |
|
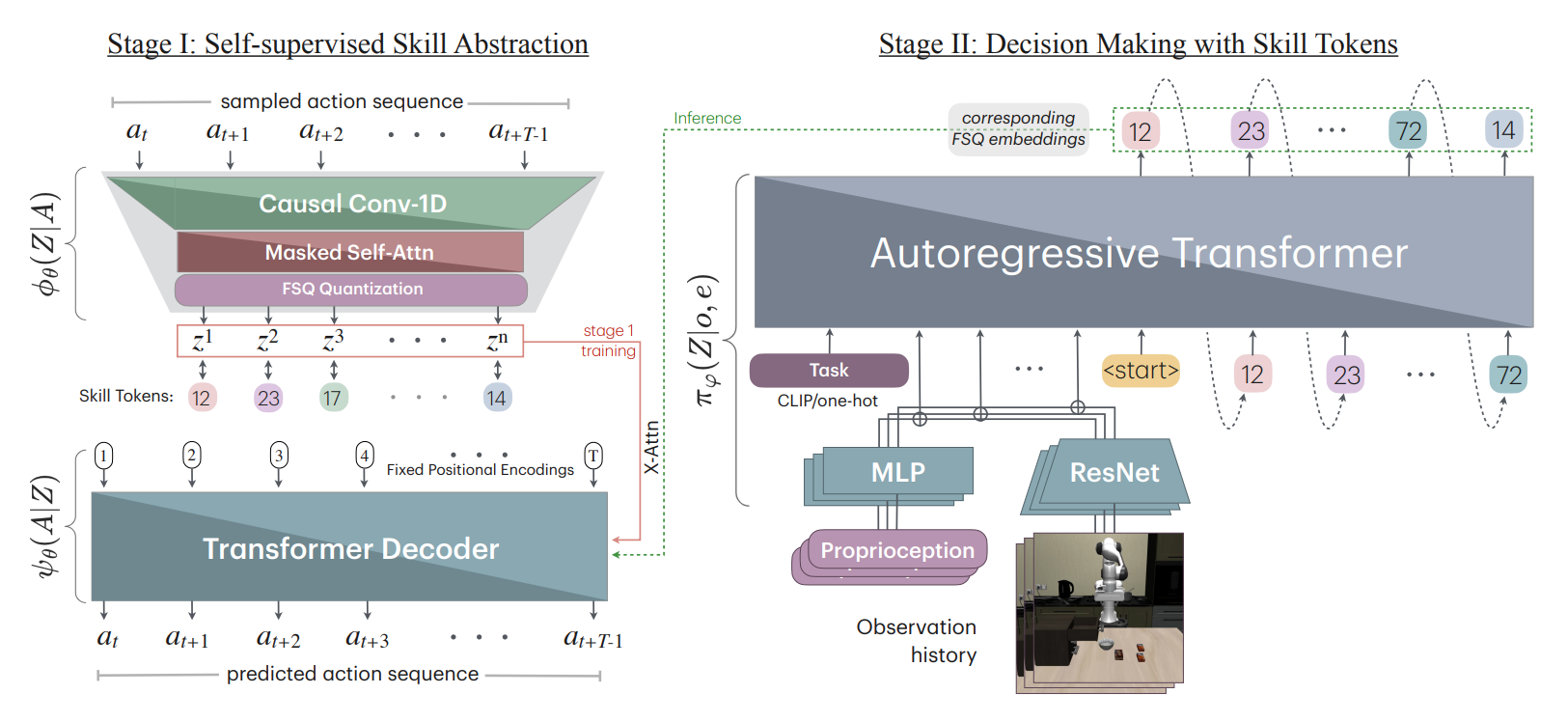
Atharva Mete, Haotian Xue, Albert Wilcox, Yongxin Chen, Animesh Garg. Conference on Neural Information Processing Systems (NeurIPS), 2024. PDF / Website A novel multitask and fewshot behavior cloning algorithm which first learns to tokenize continuous robot action sequences before using an autoregressive transformer to learn a policy in the token space. |
|
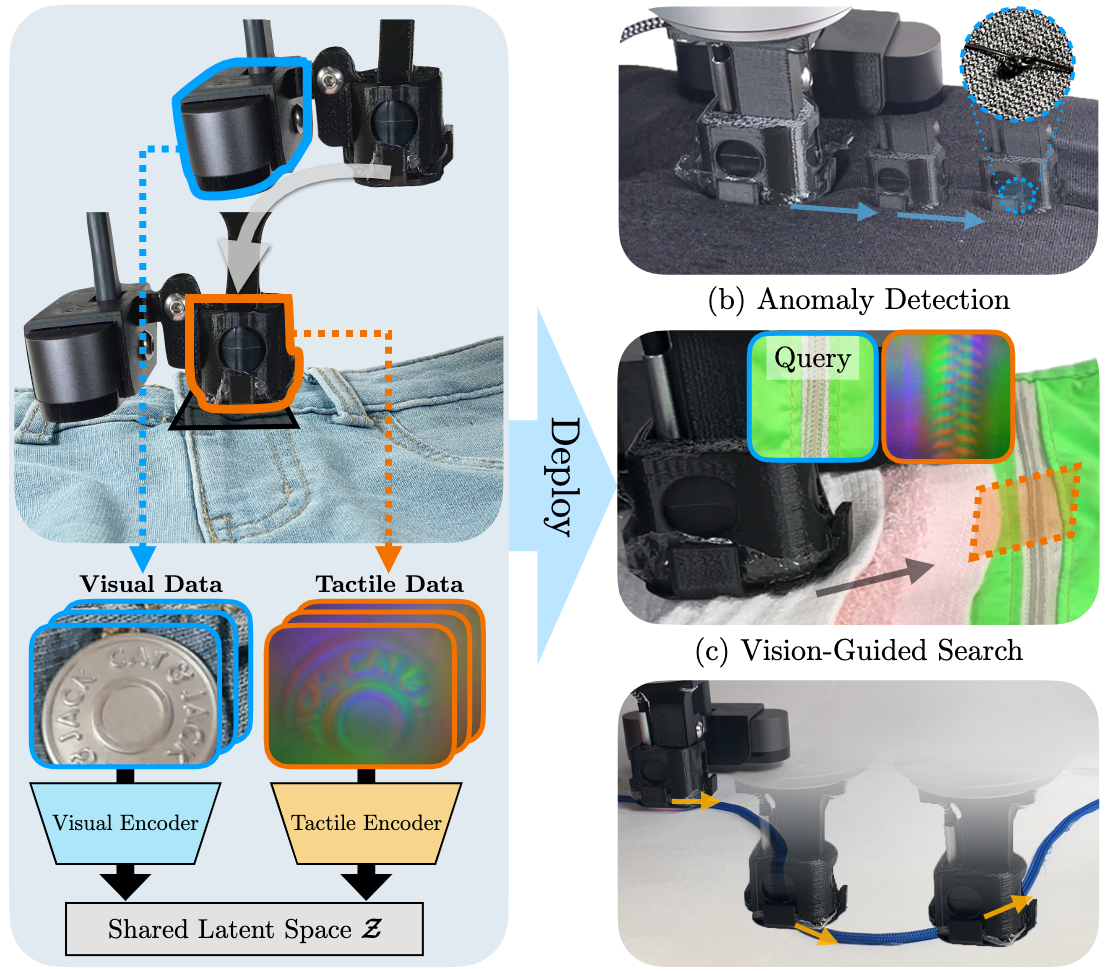
Justin Kerr, Huang Huang, Albert Wilcox, Ryan Hoque, Jeffrey Ichnowski, Roberto Calandra, and Ken Goldberg. Robotics Science and Systems (RSS), 2023. PDF / Website Learning a shared latent space between visual and tactile observations which is useful for a variety of downstream tasks. |
|
Albert Wilcox, Ashwin Balakrishna, Daniel Brown, Jules Dedieu, Wyame Benslimane, Ken Goldberg Conference on Neural Information Processing Systems (NeurIPS), 2022. PDF / Website / Bibtex An easy-to-implement change that can be made to any off-policy actor critic algorithm to speed up and stabilize sparse reward deep reinforcement learning from demonstrations. |
|
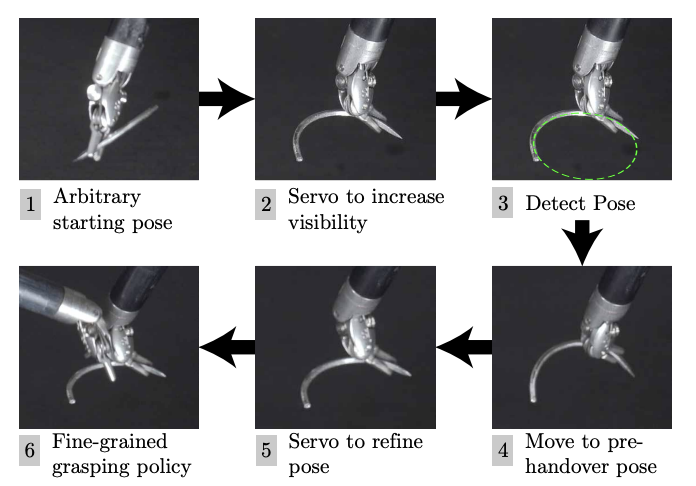
Albert Wilcox*, Justin Kerr*, Brijen Thananjeyan, Jeff Ichnowski, Minho Hwang, Samuel Paradis, Danyal Fer, Ken Goldberg IEEE International Conference on Robotics and Automation (ICRA), 2022. PDF / Website / Bibtex An algorithm combining active sensing, perception and imitation learning to reliably hand unmodified surgical needles from one arm to the other on a daVinci Research Kit surgical robot. |
|
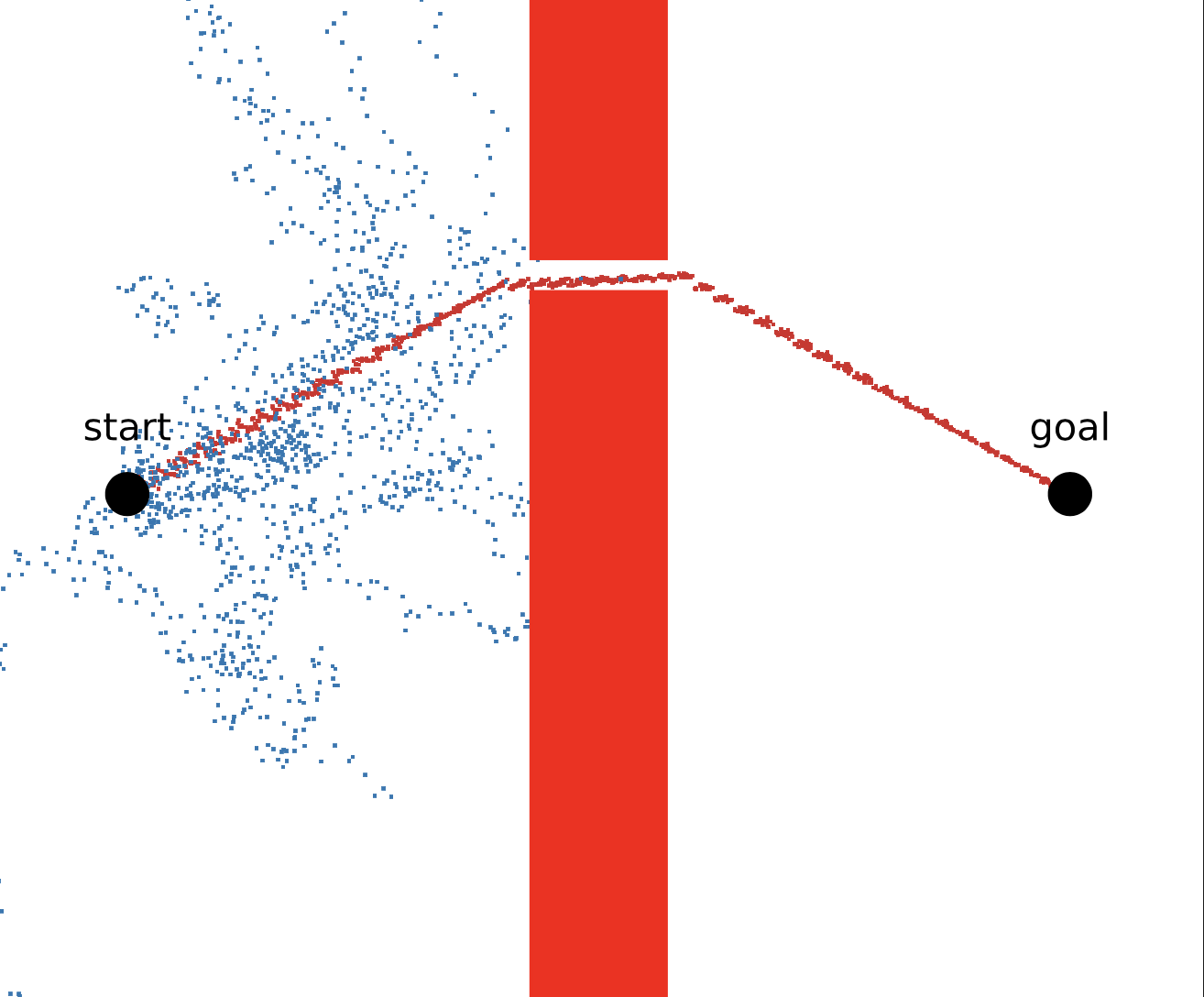
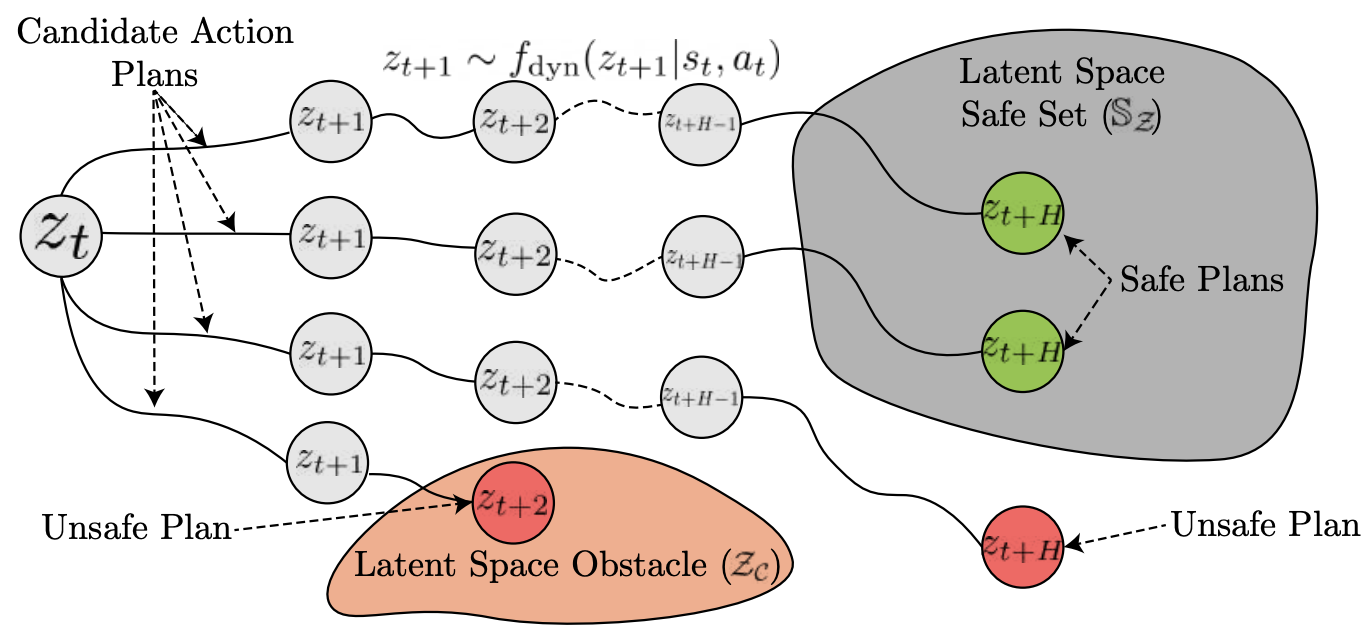
Albert Wilcox*, Ashwin Balakrishna*, Brijen Thananjeyan, Joseph E. Gonzalez, Ken Goldberg Conference on Robot Learning (CoRL) 2021. PDF / Website / Bibtex Safe and efficient RL from image observations by leveraging suboptimal demonstrations to structure exploration and examples of constraint violations to satisfy user-specified constraints. |
|
Ryan Hoque, Ashwin Balakrishna, Ellen Novoseller, Daniel S. Brown, Albert Wilcox, Ken Goldberg Conference on Robot Learning (CoRL) 2021. Oral Presentation (6.5% of papers). PDF / Website / Bibtex An interactive imitation learning algorithm that reasons about both state novelty and risk to actively query for human interventions. The algorithm balances supervisor burden and task performance more successfully than prior robot-gated algorithms and is competitive with an oracle human-gated baseline. |
|
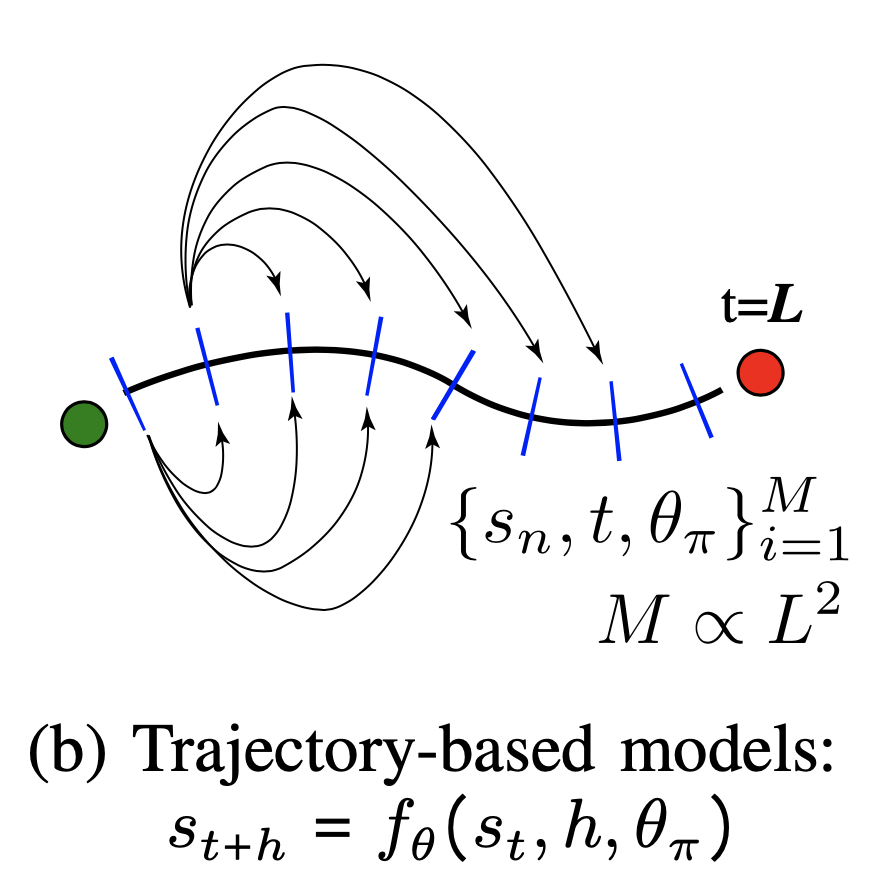
Nathan O Lambert, Albert Wilcox, Howard Zhang, Kristofer SJ Pister, Roberto Calandra IEEE Conference on Decision and Control (CDC) 2021. PDF / Website / Bibtex Reframing the model-based RL framework with long-term rather than single step state predictions using continuous "trajectory-based" models. |
|
As with the other 90% of budding ML researchers, I got my website template from Jon Barron. |